ရိုလင်းစက်များသည် အလူမီနီယမ်ပရိုဖိုင်းများအကြားတွင် ပိုလီအမိုဒ် အပူခံချောင်းများကို ကပ်လျက် ဖိအားအနည်းငယ်ကို အသုံးပြု၍ အလုပ်လုပ်ပါသည်။ ထိုသို့ဖြင့် ပြတင်းပေါက်နှင့် တံခါးစနစ်များတွင် အလျားလိုက် ဆက်တိုက်တည်ရှိသော အပူကာခံနိုင်သည့်အတားအဆီးများကို ဖန်တီးပေးပါသည်။ ကောင်းသော သတင်းမှာ ပစ္စည်းများကို ဓာတ်ကြောင်းဖြင့် ကပ်တာနဲ့ နှိုင်းယှဉ်ပါက ဤအေးမြသောပုံသဏ္ဍာန်ပေးနည်းလမ်းသည် ပစ္စည်းများကို မပျက်စီးစေဘဲ ထိန်းသိမ်းပေးနိုင်ခြင်းဖြစ်ပါသည်။ အပူလွှဲပြောင်းမှုကို ဘယ်လောက်အထိ ကာကွယ်နိုင်သည်ဆိုသည့် ကိစ္စတွင် ကွာခြားမှုကို ဖြစ်ပေါ်စေသည့် 0.5 မှ 1.2 မီလီမီတာခန့် အတိုင်းအတာရှိသော ပုံပျက်မှုအနက်များကိုလည်း တိကျစွာရရှိပါသည်။ ယနေ့ခေတ်တွင် စက်အများစုတွင် 18 မှ 25 ကီလိုနျူတန်များကြား အားများကို ထိန်းချုပ်နိုင်သည့် ခေတ်မီသော servo မောင်းနှင်ထားသည့် ရိုလာများ ပါဝင်ပါသည်။ ထိုအဆင့်သော ထိန်းချုပ်မှုသည် 50 မီလီမီတာအထိ ကျယ်ပြန့်နိုင်သည့် ချောင်းများကို ပြဿနာမရှိဘဲ တစ်သမတ်တည်း ဖိအားပေးနိုင်စေပါသည်။
ပေါလီအမိုက်စ် တန်းစီမှုကို ကြိုတင်ချုံ့ထားသော အလူမီနီယမ် ချိတ်ဆက်မှုများအတွင်းသို့ ပုံသွင်းထားသော ရိုလာများက ဖိအားပေး၍ 40°C မှ 80°C အထိ အပူချိန်ပြောင်းလဲမှုကို ခံနိုင်ရည်ရှိပြီး အလွှာမခွာဘဲ စက်မှုအဆက်အသွင်းဖြစ်စေသည်။ ဤလုပ်ငန်းစဉ်သည် ဖိအားကို တိကျစွာနှင့် ထပ်တလဲလဲ အသုံးပြုခြင်းကြောင့် လက်ဖြင့် ဖိအားပေးခြင်းထက် 22% ပိုမိုကောင်းမွန်သော ဓားစားခံနိုင်အားရှိပြီး 98% အဆက်အသွယ် မှန်ကန်မှုကို ရရှိစေသည် (Materials Engineering Journal, 2023)။
ထုတ်လုပ်မှုစက်များဖြင့် အလူမီနီယမ်ကို စက္ကန့်ကို ၀.၈ မှ ၁.၅ မီလီမီတာခန့် ပုံသွင်းပေးသည့်အခါ အပူချိတ်ဆက်မှုကို ကောင်းမွန်စေရန် အပူချိတ်ဆက်မှုပြွန်များကို ခိုင်မာစွာ တွန်းထိန်းပေးသည့် ဒိုဗျိုင်းပုံသဏ္ဍာန် ဆက်သွယ်မှုများကို ဖန်တီးပေးပါသည်။ ဤလုပ်ငန်းစဉ်တစ်ခုလုံးသည် ဓာတ်ကြွေးအစား ပွတ်တိုက်မှုပေါ်တွင် အခြေခံပြီး ဓာတ်ကြွေးများ ခဲခဲသည်ကို စောင့်စရာမလိုဘဲ မီတာကယလ်ဗင် ၀.၁ အောက်ရှိ အပူစီးဆင်းမှုကို ဆက်လက်ထိန်းသိမ်းပေးပါသည်။ နောက်ဆုံးပေါ်စက်များတွင် လည်ပတ်စဉ် ဖိအားကို စောင့်ကြည့်ရန် စက်တပ်ဆင်ထားသော ဆင်ဆာများ ပါဝင်ပါသည်။ ၁၅ ကီလိုနျူတန်အောက်သို့ ဖိအားကျဆင်းလာပါက အစိတ်အပိုင်းများကြားတွင် လေအိတ်များ ကျန်ရစ်စေနိုင်သောကြောင့် စောင့်ကြည့်ရပါသည်။ သို့သော် ဖိအားသည် ၂၈ kN ကျော်လွန်ပါက ယနေ့ခေတ်တွင် အသုံးများသော ပေါလီအမိုက်များရှိ ပုံဆောင်တည်ဆောက်ပုံကို ထိခိုက်စေနိုင်သောကြောင့် ထိုအချက်ကိုလည်း သေချာစွာ ထိန်းသိမ်းရန် လိုအပ်ပါသည်။
ပေါလီအမိုဒ် သက်ရောက်မှုကို ခံနိုင်ရည်ရှိသော ထုတ်လုပ်မှုအတွက် သင့်တော်သော လှိမ့်စက်ကို ရွေးချယ်ရာတွင် လှိမ့်ဂျီဩမေတြီ၊ အားသတ်မှတ်ချက်နှင့် အလိုအလျောက်စနစ် စွမ်းဆောင်ရည်တို့ကဲ့သို့သော နည်းပညာဆိုင်ရာ အချက်သုံးချက်ကို ဂရုတစိုက် စိစစ်ဆန်းစစ်ရန် လိုအပ်ပါသည်။ ထိုသို့သော အချက်များသည် ထုတ်လုပ်မှု ထိရောက်မှုကို ထိန်းသိမ်းရင်း အလူမီနီယမ် ပရိုဖိုင်းများနှင့် အာကာသဓာတ်များကြား တိကျသော စက်ပိုင်းဆိုင်ရာ လော့ခ်ခ်ျိတ်ဆက်မှုကို ရရှိရန် စက်၏ စွမ်းဆောင်ရည်ကို ဆုံးဖြတ်ပေးပါသည်။
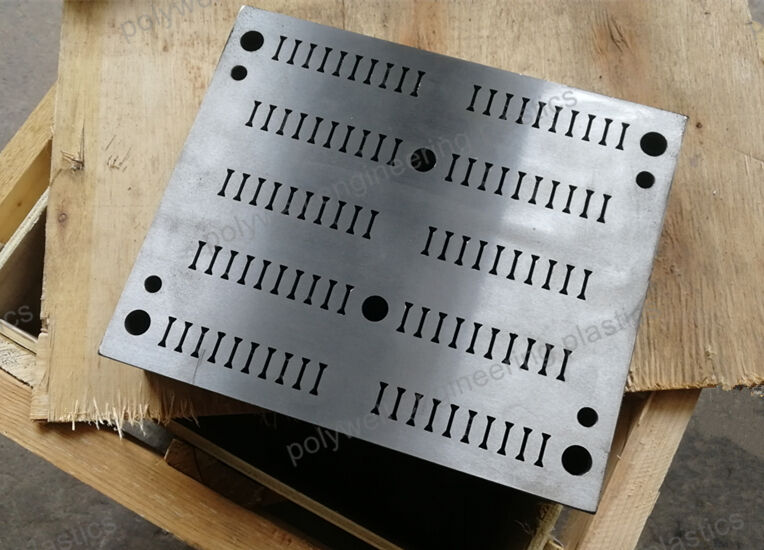
ပုံသဏ္ဍာန်များကို ပြားချပ်စေသည့်အခါ ဆက်သွယ်မှုပုံစံနှင့် ဖိအားများ စုပုံရာတွင် လုံးများ၏ ပုံသဏ္ဍာန်သည် အရေးပါသော အခန်းကဏ္ဍမှ ပါဝင်ပါသည်။ ပေါ်လီအမိုဒ် အပူခံခြားနားမှုများကို အသုံးပြုသည့်အခါ ၁.၅ မှ ၃.၅ မီလီမီတာအထိ ထူမှုရှိသော ပြားပြားများနှင့် ၈ မှ ၂၀ မီလီမီတာအကျယ်ရှိသော အလူမီနီယမ် ပရိုဖိုင်းများကို ကိုင်တွယ်ရန် စက်ကိရိယာများ လိုအပ်ပါသည်။ လုံးများ၏ အချင်းဝက်ကို သင့်လျော်စွာ ကိုက်ညှိခြင်းမပြုပါက အစိတ်အပိုင်းများကြား နောက်ဆုံးဆက်သွယ်မှုကို အားနည်းစေသည့် မညီညာသော ပုံပျက်ခြင်းများ စတင်ဖြစ်ပေါ်လာပါသည်။ အချို့သော ရှုပ်ထွေးသည့် ပုံသဏ္ဍာန်များသည် ပရိုဖိုင်းပုံသဏ္ဍာန်နှင့် အရွယ်အစားများစွာကို ကိုင်တွယ်ရာတွင်ပါ ချုပ်ထားမှုသည် တစ်သမတ်တည်းရှိစေရန် ပိရမစ်ပုံ သို့မဟုတ် ဘေးချင်းချင်း စီထားသော လုံးများကဲ့သို့သော အထူးစီစဉ်မှုများ လိုအပ်ပါသည်။
200–1,200 kN အားပမာဏများသည် အပူခံကွဲပြားမှု အရွယ်အစားနှင့် ပစ္စည်း၏ မာကျောမှုအဆင့်များကို ထောက်ပံ့ပေးပါသည်။ အားနည်းသောစက်များတွင် ပုံပျက်မှုမပြည့်ဝခြင်း ဖြစ်နိုင်ပြီး၊ အလွန်အားကောင်းပါက ပေါလီအမိုဒ် (polyamide) အတွင်းပိုင်းကို ဖဲ့ထုတ်နိုင်ပါသည်။ စက်၏ အမှတ်အသားပြုထားသော အားပမာဏ၏ 80–90% အတွင်းတွင် လည်ပတ်ခြင်းဖြင့် ဆက်သွယ်မှု၏ ခိုင်မာမှု တည်ငြိမ်မှုကို 15% တိုးတက်စေပြီး အမြဲတမ်းပုံပျက်မှုနှင့် စတိုင်ပ်၏ ပြည့်ဝမှုကို ဟန်ချက်ညီစေပါသည်။
CNC စနစ်များသည် ဖိအားပေးခြင်းနှင့် လှိမ့်ဂဴများ၏ တည်နေရာသတ်မှတ်မှုတွင် မိုက်ခရိုမီတာအဆင့် တိကျမှုကို ဖြစ်စေပါသည်။ အလိုအလျောက် ညှိနှိုင်းမှုများသည် လက်တွေ့စနစ်များနှင့် နှိုင်းယှဉ်ပါက စတင်ပြင်ဆင်မှုအချိန်ကို 40% လျှော့ချပေးပြီး၊ အချိန်နှင့်တစ်ပြေးညီ ပြန်လည်အကြံပေးမှုများက ပစ္စည်းပြန်တက်မှုကို ပြင်ဆင်ပေးကာ ±0.1 mm အတွင်း သတ်မှတ်ချက်များကို ထိန်းသိမ်းပေးပါသည်။ ဤထိန်းချုပ်မှုအဆင့်သည် ကားတံခါးနှင့် စွမ်းဆောင်ရည်မြင့် ပြတင်းပေါက်အသုံးပြုမှုများတွင် ဖွဲ့စည်းပုံဆိုင်ရာ စံနှုန်းများကို ပြည့်မီရန် မရှိမဖြစ်လိုအပ်ပါသည်။
ရိုလ်လီးခ်င်းစက်များအတွက် နှစ်ဆင့်နှင့် သုံးဆင့် ထုတ်လုပ်မှုနည်းလမ်းနှစ်ခုကြား ရွေးချယ်ရာတွင် ဒီဇိုင်းရွေးချယ်မှုများအပေါ် သက်ရောက်မှုမှာ အလွန်ကြီးမားပါသည်။ နှစ်ဆင့် လုပ်ငန်းစဉ်များတွင် ထုတ်လုပ်သူများသည် အလူမီနီယမ်ပုံသွင်းခြင်းနှင့် စတြစ်ဘုံဒင်းတို့ကို တစ်ပြိုင်နက်တည်း ဆောင်ရွက်ရသည့်အတွက် မျက်နှာပြင်များစွာတွင် ဖိအားကို ထိန်းချုပ်ရန် ရှုပ်ထွေးသောစနစ်များ လိုအပ်ပါသည်။ အခြားတစ်ဖက်တွင် သုံးဆင့်နည်းလမ်းများတွင် အလယ်ဗဟိုတွင် အပိုအဆင့်တစ်ခု ထပ်မံထည့်သွင်းထားပါသည်။ ၂၀၂၃ ခုနှစ်က Fabrication Technology Quarterly ၏ မက дав်ဂါ သုတေသနအရ ဤအပိုအဆင့်သည် ကျန်ရစ်သောဖိအားကို ၁၈ မှ ၂၂ ရာခိုင်နှုန်းခန့် လျှော့ချပေးနိုင်ပါသည်။ အားနည်းချက်မှာ? ရိုလ်လီးခ်င်းစက်ပစ္စည်းများတွင် နေရာကွက်လပ်များကို ချိန်ညှိရန်အတွက် နေရာယူချိန် ချိန်ညှိနိုင်မှုနှင့် အပူချိန် အတိုင်းအတာကို အတိုင်းအတာအလိုက် ပြင်ဆင်ပေးသော စနစ်များကဲ့သို့သော လုပ်ဆောင်ချက်များ တပ်ဆင်ထားရန် လိုအပ်ပါသည်။ အများစုအတွက် ထုတ်လုပ်မှုလိုအပ်ချက်များအပေါ် မူတည်၍ ဤကွာခြားချက်များကို စိစစ်ရွေးချယ်နေကြပါသည်။
အဆင့်နှစ်ဆင့်ဖြင့် လည်ပတ်သော ထုတ်လုပ်မှုစက်တန်းများသည် မီလီမီတာ 0.1 အတွင်း တိကျစွာ အထူချိန်ကို စောင့်ကြည့်နိုင်သော ရိုလ်လုပ်သည့် ပစ္စည်းများ လိုအပ်ပါသည်။ ထိုစနစ်များတွင် တစ်ပြိုင်နက် လုပ်ငန်းစဉ်များစွာကို လည်ပတ်နိုင်ရန် ဖိအားဇုန်နှစ်ခု လိုအပ်ပြီး အပူခံအကာအကွယ်ပုံစံများကို အမျိုးမျိုး ကိုင်တွယ်ရန် ကိရိယာများကို မြန်မြန်ပြောင်းလဲနိုင်သော စွမ်းရည်လည်း လိုအပ်ပါသည်။ အဆင့်သုံးဆင့် ထုတ်လုပ်မှုစနစ်များအတွက် ထုတ်လုပ်သူများသည် CNC ထိန်းချုပ်မှုဖြင့် ဖိအားပုံစံသတ်မှတ်ခြင်းသည် ကြီးမားသော ကွာခြားမှုကို ဖြစ်ပေါ်စေကြောင်း တွေ့ရှိခဲ့ကြသည်။ ထိုသို့ပြုလုပ်ခြင်းဖြင့် အစိတ်အပိုင်းများသည် ပုံပျက်မှု၏ အဆင့်များစွာကို ဖြတ်သန်းသွားသည့်အခါ အားကို အသုံးပြုပုံကို ပိုမိုကောင်းမွန်စွာ ထိန်းချုပ်နိုင်စေပါသည်။ စက်ရုံအလုပ်သမားများသည်လည်း စိတ်ဝင်စားဖွယ် အချက်တစ်ခုကို သတိပြုမိကြပါသည်။ PA6.6 ပစ္စည်းနှင့် PA66 GF25 ကို အသုံးပြုသည့်အခါတိုင်း ထိုကဲ့သို့သော ပုံစံများကို အသုံးပြုပါက လုပ်ဆောင်ချက်များကို အချိန် 30% ပိုမြန်စွာ ချိန်ညှိနိုင်ကြပါသည်။ အကြောင်းမှာ စက်ကိရိယာများသည် ထိုကဲ့သို့သော ပစ္စည်းဂုဏ်သတ္တိများကို ပိုမိုကောင်းမွန်စွာ တုံ့ပြန်နိုင်သောကြောင့် အဓိပ္ပာယ်ရှိပါသည်။
ဝိုင်ယာကြိုးစက်များ၏ ဖွံ့ဖြိုးတိုးတက်မှုသည် ရိုးရှင်းသော လက်တွေ့စက်များမှ စက်မှုလိုင်းတစ်လျှောက် ဝင်လာသည့်နှင့် ထွက်သွားသည့် အရာများနှင့် အဆင်ပြေစွာ အလုပ်လုပ်နိုင်သည့် အဆင့်မြင့် ကွန်ပျူတာထိန်းချုပ်မှုစနစ်များအထိ ရှိပါသည်။ ယခင်က အလိုအလျောက် တပ်ဆင်မှုများကို မှန်ကန်စေရန်နှင့် ဖိအားအဆင့်များကို သတ်မှတ်ရန် စက်သမားများသည် လက်ဖြင့် အကြိမ်ကြိမ် ချိန်ညှိပေးရပါသည်။ ယနေ့ခေတ်တွင် စက်အများစုသည် CNC နည်းပညာနှင့် servo မောင်းနှင်ထားသော စနစ်များကို အသုံးပြုကာ တစ်ခါတစ်ရံတွင် တစ်ခါတည်း တူညီသော crimp များကို ထုတ်လုပ်ပေးနိုင်ပါသည်။ ပြုပြင်မှုမပြုမီ ပစ္စည်းများကို ပြင်ဆင်ခြင်းအတွက် ထုတ်လုပ်သူအများအပြားသည် ယနေ့တွင် စက်ရုပ်လက်များကို စီမံကိန်းတွင် ထည့်သွင်းအသုံးပြုကြပါသည်။ ၎င်းသည် polyamide အပြားများနှင့် အလူမီနီယမ် profile များကို ပုံပျက်မဖြစ်မီ တိကျစွာ တည်နေရာချရန် ကူညီပေးပြီး နောင်အချိန်တွင် ထုတ်ကုန်အရည်အသွေးကို အလွန်ကြီးမားသော အကျိုးသက်ရောက်မှုကို ဖြစ်ပေါ်စေပါသည်။
အလိုအလျောက်ထုတ်လုပ်ရေးစက်တန်းများတွင် ရိုလ်လုပ်စက်များကို တိုက်ရိုက်တပ်ဆင်လိုက်သည့်အခါ၊ လုပ်သားများက အစိတ်အပိုင်းများကို လက်ဖြင့် ရွှေ့ပြောင်းရမှုကြောင့် ဖြစ်ပေါ်လေ့ရှိသည့် စက်ဝိုင်းပိတ်မှုများကို ဖယ်ရှားပေးပါသည်။ စနစ်တစ်ခုလုံးသည် ပေါင်းစပ်လုပ်ဆောင်မှုရှိပြီး ပစ္စည်းများကို ဖြတ်တောက်ရာနေရာမှ စတင်၍ ရိုလ်လုပ်မှုအဆင့်သို့ ပြီးလျှင် အရည်အသွေးစစ်ဆေးမှုအဆင့်အထိ တိုက်ရိုက်သယ်ဆောင်နိုင်ပါသည်။ စက်ရုံများက စနစ်ကို စတင်ပြင်ဆင်ရန် ယခင်က သုံးစွဲခဲ့သည့် အချိန်၏ နှစ်ပုံတစ်ပုံခန့်ကို ခြောက်သိမ့်စွာ ချွေတာနိုင်ကြောင်း အစီရင်ခံထားပါသည်။ ဤကဲ့သို့သော ပေါင်းစပ်လုပ်ငန်းစဉ်များသည် အစိတ်အပိုင်းများကြားရှိ ဆက်သွယ်မှုများကို ပျက်စီးစေနိုင်သည့် ကိုင်တွယ်မှုအမှားများကို သိသိသာသာ လျှော့ချပေးပါသည်။ ထို့အပြင် ထုတ်လုပ်သူများသည် အဆက်မပြတ် ရပ်တန့်မှုများကင်းစွာ ပိုမိုကြာရှဲ့သော အချိန်ကာလအတွင်း အပြည့်အဝထုတ်လုပ်နိုင်မှုရှိပြီး မတူညီသော စက်မှုလုပ်ငန်းများတွင် ထုတ်လုပ်မှုပမာဏလိုအပ်ချက်များကို ဖြည့်ဆည်းပေးရာတွင် ကြီးမားသော ကွာခြားမှုကို ဖြစ်ပေါ်စေပါသည်။
၂၀၂၃ စက်မှုလုပ်ငန်းဆိုင်ရာ ဆန်းစစ်ချက်အရ အပြည့်အဝ အလိုအလျောက် ရော်လစ်လိုင်းများ အသုံးပြုသည့် စက်ရုံများသည် အပိုင်း အလိုအလျောက် တပ်ဆင်ထားသော စက်ရုံများထက် ၃၈% ၄၂% ပိုမြင့်မားသော ထုတ်ကုန်ထုတ်လုပ်မှုရရှိခဲ့သည်။ ဒီတိုးတက်မှုတွေဟာ မပြတ်သားတဲ့ လုပ်ဆောင်မှုနဲ့ ကြိုတင်ခန့်မှန်းတဲ့ ထိန်းသိမ်းမှု အယ်လ်ဂိုရီသမ်ကြောင့် ဖြစ်ပြီး အစီအစဉ်မထားတဲ့ ရပ်နားချိန်ကို ၂၇% လျှော့ချပေးပါတယ်။ ဒီလိုစနစ်တွေက အတန်းတွေအကြားမှာ တူညီတဲ့ စက်ပစ္စည်း ပိတ်ချမှုကို အာမခံတဲ့ ±1.5% အတွင်းမှာ လှည့်ပတ်အားကို ထိန်းသိမ်းပါတယ်။
ပိုလီအမ်မိုက် အပူပိုင်း ချိုးဖောက်မှုတွေရဲ့ တစ်သမတ်တည်း ဖိအားပေးမှုအတွက် ±2.5% အတွင်းမှာ လှုပ်ခါမှုအား တိကျမှုနဲ့ 0.1 mm ထက် ပိုကောင်းတဲ့ ချိတ်ဆက်မှု တိကျမှု လိုအပ်ပါတယ်။ CNC ထိန်းချုပ်သော ရော်လာစက်များသည် servo driven adjustment များဖြင့် ဤလိုအပ်ချက်များကို ဖြည့်ဆည်းပေးလျက်၊ တစ်စင်းလုံးတွင် တစ်သွေမပြတ် ဖောက်ပြန်မှုကို အာမခံပေးသည်။ အချိုးအစားမှန်ကန်စွာ တိုင်းတာခြင်းအားဖြင့် အကာအကွယ်ဆက်လက်မှုကို ထိခိုက်စေနိုင်တဲ့ ဖိအား မညီမျှမှုကို ကာကွယ်ပေးပါတယ်။
လုပ်ငန်းစဉ်နောက်ဆုံး စစ်ဆေးမှုမှာ လေအပေါက်အတွက် အော်လ်ထရွန်းနစ် စမ်းသပ်မှုနှင့် အလူမီနီယံ ပိုလီယာမီဒ အစုလိုက်အပြုံလိုက်များတွင် အချုပ်အခြာအား ၁၂၀ MPa ထက်ပို၍ရှိကြောင်း အတည်ပြုသည့် အလိုအလျောက် ဆွဲဆန့်မှု စမ်းသပ်မှုတို့ ပါဝင်သည်။ ထိပ်တန်းထုတ်လုပ်သူများသည်လည်း crimped profiles များကို CAD မော်ဒယ်များနှင့် နှိုင်းယှဉ်၍ 0.3 mm ထက်ပိုသော deviations များကို အချိန်နှင့်တပြေးညီ မှတ်သားနိုင်သည့် inline optical inspection system များကို အသုံးပြုကြသည်။
ပိတ်လှည့်အားပြန်ကြားရေးစနစ်များက ဖိအားအနက်ကို ဒိုင်နမိတ်ကျစွာပြင်ဆင်ခြင်းဖြင့် အပြောင်းအလဲအမှားများကို တားဆီးပေးသည်။ အပူပိုင်းပိုင်း ချိုးဖောက်မှုများ၏ ၆၈% ကို ကျဆင်းမှုများ၏ အောက်တွင် ချိုးဖောက်ခြင်းဖြင့် ဖြေရှင်းနိုင်သည် (Thermal Break Consortium, 2023) အဆင့်မြင့်စက်တွေဟာ 812 kN/mm2 အံဝင်ခွင်ကျ ဖိအားကို ထိန်းသိမ်းဖို့ တင်းမာမှုတိုင်းစက် အာရုံခံကိရိယာတွေကို သုံးပြီး တည်ဆောက်မှု ခိုင်မာမှုနဲ့ အပူစွမ်းဆောင်ရည် နှစ်ခုစလုံးကို ထိန်းသိမ်းပါတယ်။
 အရေးကြီးသော သတင်းများ
အရေးကြီးသော သတင်းများ
POLYWELL သည် polyamide granules၊ extruders၊ မှိုများ၊ အကွေ့အကောက်များသောစက်များနှင့် ပြည့်စုံသော တစ်နေရာတည်းတွင် စိတ်ကြိုက်ပြုပြင်ခြင်းဝန်ဆောင်မှုများကို ပေးဆောင်သည့် PA66 အပူလျှပ်ကာအကွက်များကို အထူးပြုပါသည်။
တရုတ်နိုင်ငံ၊ ကျင်ဆွဲပြည်နယ်၊ ဆိုးချူမြို့၊ ချန်ဂျီအာင်မြို့၊ ဇင်ဖိုင်းမြို့
လိုင်စင် © 2024 ဆိုးချူပိုလီဝဲလ် အင်ဂျင်နီယာ링 ပลาစ္စတစ် ကုမ္ပဏီ လီမိတက် လုံခြုံရေးမူဝါဒ

 EN
EN